Emlid set out to make professional GNSS equipment accessible without compromising accuracy or reliability. Today, more than 20,000 users worldwide rely on our receivers, from construction sites to drone surveys, from agriculture to geophysics, proving that high-precision positioning can be both powerful and affordable.
Share a few details, and our Sales Engineers will help you pick the right gear for the job.
By submitting this form, you consent to allow Emlid to store and process the personal data.
Drone-based surveying & mapping
Set up a base station and collect GCPs with Reach RS3
Works online & offline
Free GCP collection in Emlid Flow
RTK & PPK drones
Free PPK photo geotagging in Emlid Studio
Provides high precision for your UAV, regardless of cellular coverage or distance from urban areas. To collect ground control points, connect a second Reach RS3 or Reach RX2.
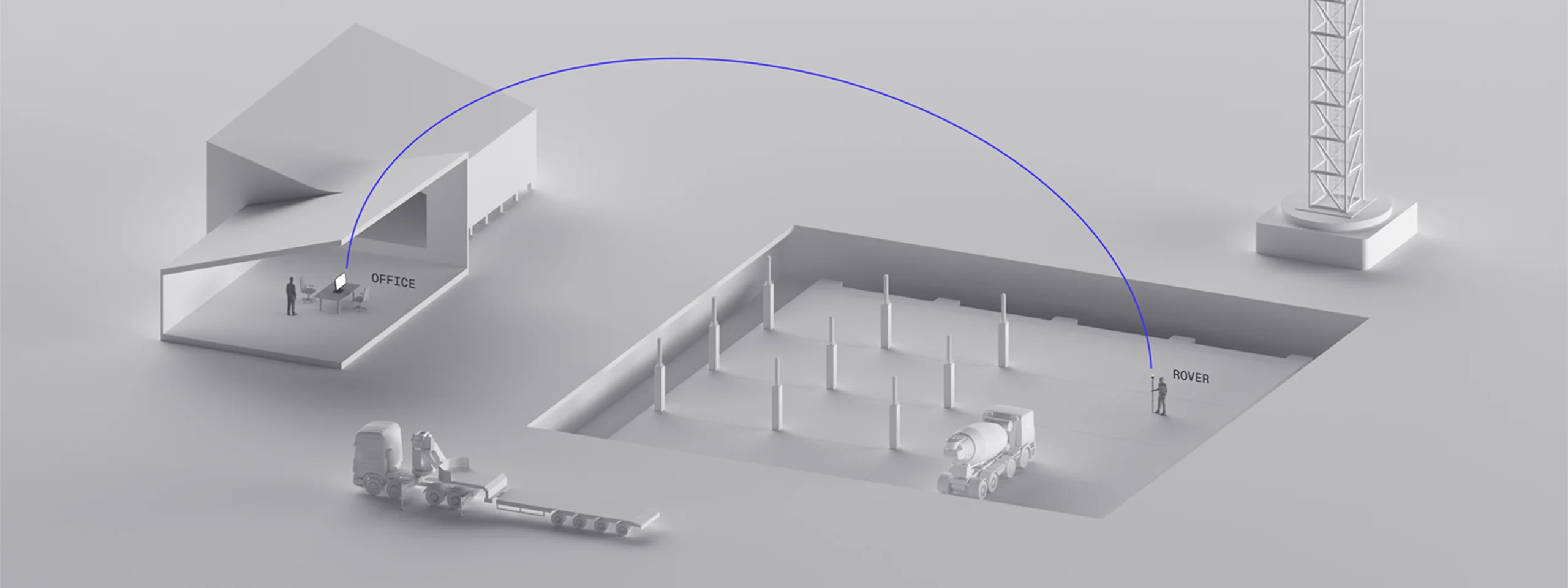
Reach RS4 Pro and Emlid Flow for accurate site work
Emlid Flow lets you work with CAD files and DTMs, collect and stake out points, calculate geometry, and ensure structures are positioned exactly to plan. With cloud-based Emlid Flow 360, your field and office always stay in sync.
Paired with Reach receivers, you get centimeter accuracy – even when tilted – and a battery that lasts all day, ensuring reliable performance in the field.
Compact receiver for collecting lots of data quickly, every day. Designed to deliver high accuracy even tilted. No need for extensive GPS and GNSS expertise.
Emlid Flow is a mobile and web application for setting up Emlid receivers, collecting and staking out data, and managing projects with cloud synchronisation.
Artefact recording, topo survey, scanning, UAVs, geophysical research - almost every Emlid product has been used in archaeological projects in Greece and Italy.
“We used the Reach RX to map water restoration features at a hotel—like raingardens and flood zones—with the precision we couldn’t get from phones or drones in an urban setting.”
We have over 10,000 users from various backgrounds. And we're happy to provide a place to not only discuss our products, but to solve challenges and share experiences.
If you need anything, we are here for you. Watch our YouTube tutorials, read and download documentation, and chat with our support team via email or social media. Our team is based in the EU and will answer your questions within one business day.
Which Emlid RTK GNSS receivers are best suited for land surveying?
Emlid GNSS receivers are designed for high-accuracy surveying, GIS, and other geospatial applications. Reach devices track signals from multiple satellite constellations—GPS, GLONASS, Galileo, BeiDou, QZSS, and NavIC.
Reach RX2 is a compact rover with Bluetooth connectivity and tilt compensation, perfect for working with correction services.
Reach RS4 includes a built-in IMU sensor (inertial measurement unit) providing tilt compensation, a long-lasting battery, all-band support and works with corrections from LoRa, UHF, or NTRIP reference stations.
Reach RS4 Pro additonally features dual camera for AR stakeout and measuring from photos.
Yes. Reach GNSS receivers work in construction, utilities, agriculture, drone mapping, and more. Whether you're placing boundaries or laying out roads, they’re highly accurate and reliable—even in urban environments. Control your survey using the Emlid Flow mobile app on iOS or Android. Its intuitive interface makes configuration quick, and your data stays synced with Emlid Flow 360. After fieldwork, export data in your preferred format. If you want to learn more, our team is ready to help you choose the best setup for your workflow.
Are Reach receivers suitable for the industry I work in?
Yes. Reach GNSS receivers work in construction, utilities, agriculture, drone mapping, and more. Whether you're placing boundaries or laying out roads, they’re highly accurate and reliable—even in urban environments. Control your survey using the Emlid Flow mobile app on iOS or Android. Its intuitive interface makes configuration quick, and your data stays synced with Emlid Flow 360. After fieldwork, export data in your preferred format. If you want to learn more, our team is ready to help you choose the best setup for your workflow.
Does Emlid offer any software for surveyors working with Reach receivers?
Absolutely. Emlid offers a robust software suite to digitally handle field and office tasks:
Emlid Flow supports real-time collection and NMEA output for third-party integrations.
Emlid Flow 360 keeps your projects connected across devices.
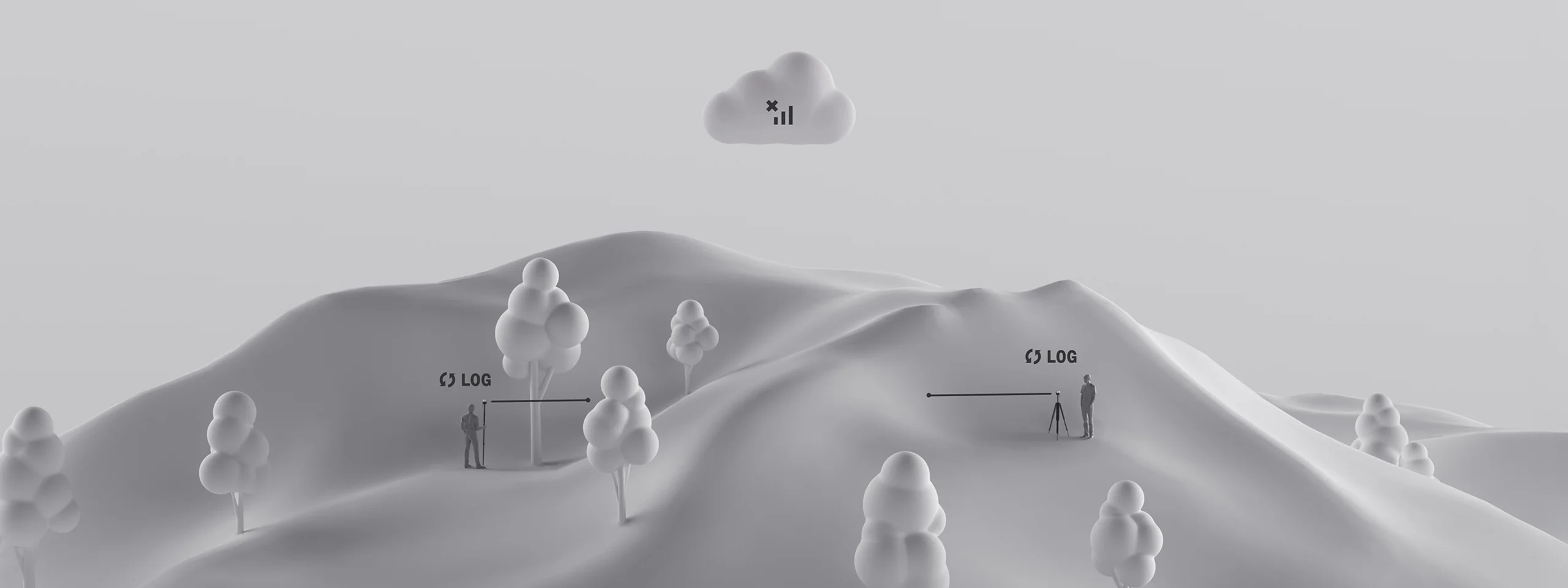
Emlid Studio is a free tool for post-processing RINEX logs.
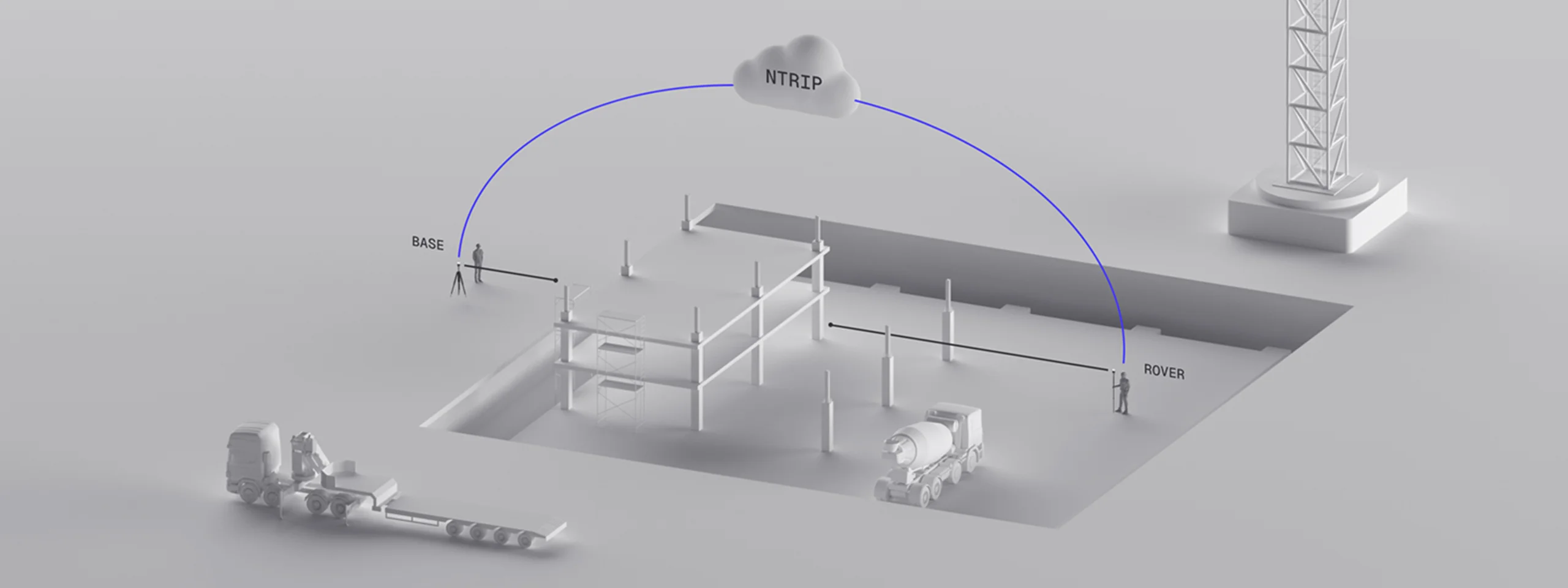
Emlid NTRIP Caster can be used to stream data between devices.
This ecosystem is tailored to get precise positioning using real-time kinematic or post-processing workflows.
Reach M2 GNSS module for aerial navigation and integrations,
GNSS antennas, poles, and other accessories.
How accurate are Reach receivers in real-world conditions?
Reach receivers deliver centimeter-level precision even in complex environments like construction sites. You can measure points confidently on a baseline up to 100 km. You can either position using RTK corrections or apply post-processing techniques later.





.webp)
 Works online & offline
Works online & offline Free GCP collection in Emlid Flow
Free GCP collection in Emlid Flow RTK & PPK drones
RTK & PPK drones Free PPK photo geotagging in Emlid Studio
Free PPK photo geotagging in Emlid Studio

 iOS / iPadOS
iOS / iPadOS
 Android
Android
 Any browser
Any browser

 ArcGIS Field Maps
ArcGIS Field Maps

 Read full story
Read full story


 Full article
Full article




 7 mm + 1 ppm
7 mm + 1 ppm Tilt compensation
Tilt compensation Dual cameras
Dual cameras RINEX logging
RINEX logging Base
Base  Rover
Rover  LoRa / UHF / NTRIP
LoRa / UHF / NTRIP 16 hrs on one charge
16 hrs on one charge 943 g
943 g IP68
IP68

