
Positioning with centimeter accuracy
in RTK and PPK. For precise UAV
mapping with less GCPs.
Multi-band.
Baseline up to 100 km in PPK.
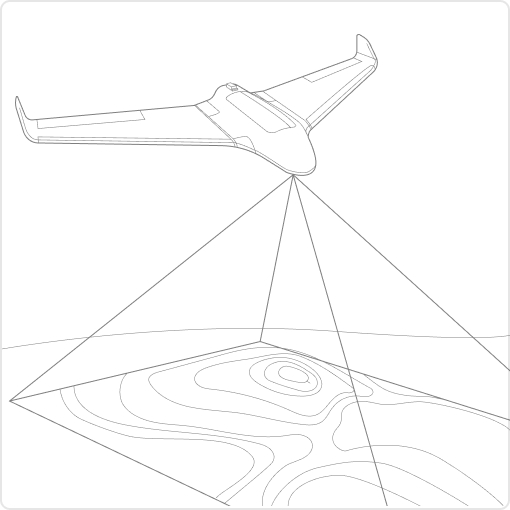
Usually autopilot triggers the camera and records the coordinate it has at that moment. When the drone is flying at 20 m/s and GPS works at 5 Hz, that means your autopilot will have position readings only each 4 m, which is not suitable for precise georeferencing. In addition, there is always a delay between the trigger and the actual moment the photo is taken.
Reach solves the problem of positioning by connecting directly to the camera hot shoe port, which is synced with the shutter. The time and coordinates of each photo are logged with a resolution of less than a microsecond. This method allows GCPs to be used only to check your accuracy.
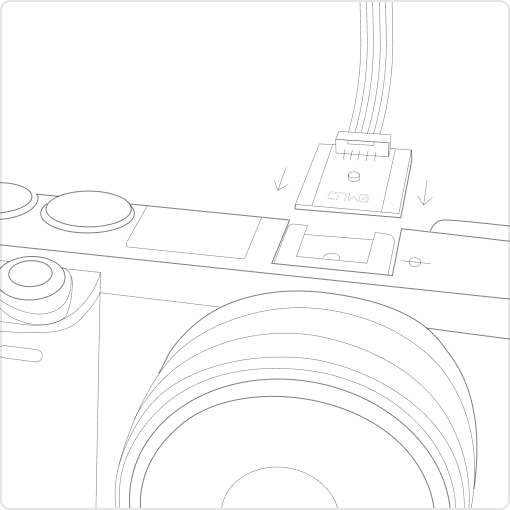
Every time a photo is taken camera produces a pulse on a flash hot-shoe connector which is synced to a shutter opening.
Reach captures flash sync pulses with sub-microsecond resolution and stores them in a raw data RINEX log in the internal memory.
After the flight, get the RINEX logs from your airborne Reach module and a base station (Reach RS, CORS or another receiver).
Process RINEX files using free RTKLIB software. The produced file with precise coordinates of the photos can be used for georeferencing.

To calculate centimeter-precise coordinates in PPK and RTK, Reach needs corrections from a base station. It could be either another Reach receiver or an NTRIP service. VRS is also supported.
Compatibility
Reach M2 works seamlessly with other Reach receivers over any link and are compatible with any other receiver that supports RTCM3 and NTRIP.

Emlid Flow is a mobile app for iOS and Android. The app handles all the fieldwork—receiver settings and data collection. All survey data is in sync with cloud-based service Emlid Flow 360, which allows you to access your projects from the browser and manage survey data.
Logs are automatically recorded in the RINEX format for further post-processing. View a list of the logs and download them using the Emlid Flow app.
For PPK, you can use our free software Emlid Studio.
Emlid Flow shows current satellite levels and your location on a map. It allows you to easily access full information about the receiver: battery charge, type of Internet connection, and receiver solution status.
Upload topographic maps, cadastral plans, and aerial imagery from WMS and WMTS sources or work with a built-in satellite map.
The Emlid Flow app is synchronized with the Emlid Flow 360 service. This allows you to create and access survey projects, manage coordinate systems, and export and import data using both the mobile app and the cloud service at flow360.emlid.com.
3DroneMapping completes PPK trials with the average zero mean error in all axes
Luke Wijnberg, 3DroneMapping
As a brief synopsis of the results, the maximum deviation of points was no more than 0.09m in all axes. This is an incredible result given the fact that the average pixel size of the resulting imagery was 0.045m. The average mean error in all axes is just few mm!
Tuffwing gets 4cm precision without GCPs with Emlid Reach RTK
Brian Christal, Tuffwing
Tuffwing recently performed integration of Emlid Reach RTK to enable precision maps to be made without the use of GCPs. The system has been benchmarked by comparing a direct georeferenced model with a set of GCPs, used solely for error detection purposes. The lateral RMS error achieved is just 4cm according to the Pix4D quality report.
Evеnt38 integrates Emlid Reach and starts providing a ready-to-go PPK mapping solution
Jeff Taylor, Event38
In this case study, we produced an orthomosaic in the Drone Data Management System™ with 2.45cm horizontal and 5.08cm vertical RMSE, as compared with a survey-grade GPS on the ground.
Mechanical
Electrical
Positioning
Connectivity
Data
GNSS
Fill in the contact form, and we will reply within a working day (9:00-18:00 CET).
Direct Dial: +1 817 865 3334 (ex. 101)
Alternatively, you can text us here:
.webp)
