
Positionnement avec une précision centimétrique en RTK et PPK. Pour une cartographie précise par UAV avec moins de GCP.
Multibande.
Ligne de base jusqu'à 100 km en PPK.
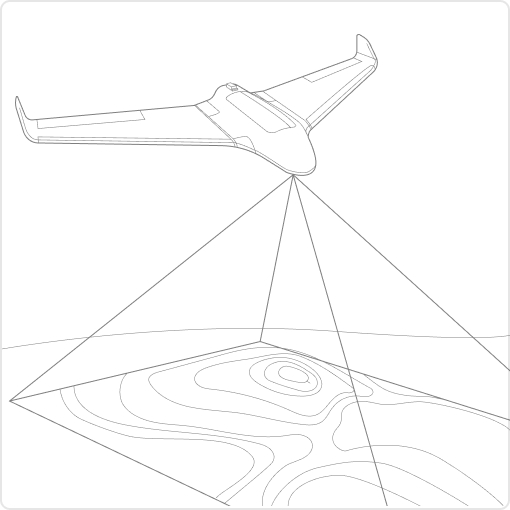
En général, le pilote automatique déclenche la caméra et enregistre les coordonnées qu'il a à ce moment-là. Lorsque le drone vole à 20 m/s et que le GPS fonctionne à 5 Hz, cela signifie que votre pilote automatique n'aura des relevés de position que tous les 4 m, ce qui n'est pas adapté à un géoréférencement précis. En outre, il y a toujours un délai entre le déclenchement et le moment où la photo est prise.
Reach résout le problème du positionnement en se connectant directement au port de la griffe de l'appareil photo, qui est synchronisé avec l'obturateur. L'heure et les coordonnées de chaque photo sont enregistrées avec une résolution inférieure à la microseconde. Cette méthode permet d'utiliser les GCP uniquement pour vérifier votre précision.
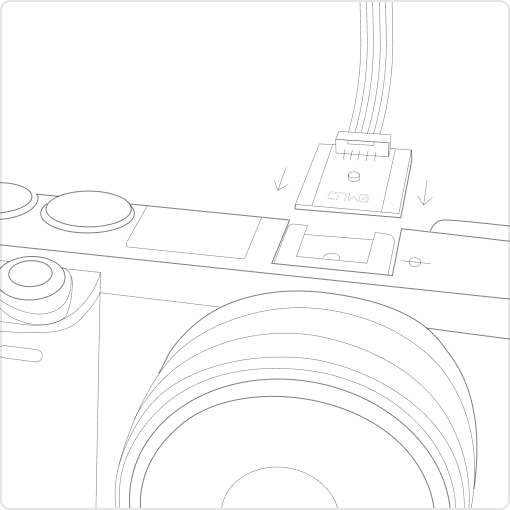
Chaque fois qu'une photo est prise, l'appareil photo produit une impulsion sur le connecteur du flash qui est synchronisée avec l'ouverture de l'obturateur.
Reach capture les impulsions de synchronisation du flash avec une résolution inférieure à la microseconde et les stocke dans un journal RINEX de données brutes dans la mémoire interne.
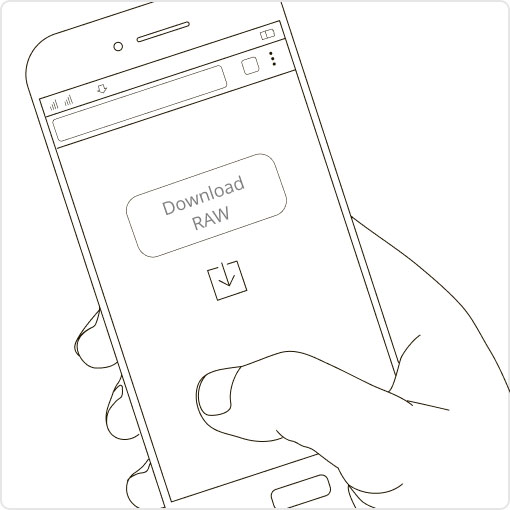
Après le vol, récupérez les enregistrements RINEX de votre module Reach aéroporté et d'une station de base (Reach RS, CORS ou autre récepteur).
Traitez les fichiers RINEX à l'aide du logiciel gratuit RTKLIB. Le fichier produit avec les coordonnées précises des photos peut être utilisé pour le géoréférencement.

Pour calculer des coordonnées précises au centimètre près en PPK et RTK, Reach a besoin de corrections provenant d'une station de base. Il peut s'agir d'un autre récepteur Reach ou d'un service NTRIP. Le VRS est également pris en charge.
Compatibilité
Reach M2 fonctionne de manière transparente avec d'autres récepteurs Reach sur n'importe quel lien et est compatible avec tout autre récepteur supportant RTCM3 et NTRIP.

Emlid Flow est une application mobile pour iOS et Android. L'application gère l'ensemble du travail sur le terrain : les paramètres du récepteur et la collecte des données. Toutes les données d'arpentage sont synchronisées avec le service Emlid Flow 360 basé sur le cloud, qui vous permet d'accéder à vos projets à partir d'un navigateur et de gérer les données d'arpentage.
Les journaux sont automatiquement enregistrés au format RINEX pour un post-traitement ultérieur. Consultez la liste des enregistrements et téléchargez-les à l'aide de l'application Emlid Flow.
Pour PPK, vous pouvez utiliser notre logiciel gratuit Emlid Studio.
Emlid Flow affiche les niveaux actuels des satellites et votre position sur une carte. Il vous permet d'accéder facilement à des informations complètes sur le récepteur : charge de la batterie, type de connexion Internet et état de la solution du récepteur.
Téléversez des cartes topographiques, des plans cadastraux et des images aériennes à partir de sources WMS et WMTS ou travaillez avec une carte satellite intégrée.
L'application Emlid Flow est synchronisée avec le service Emlid Flow 360. Cela vous permet de créer et d'accéder à des projets d'arpentage, de gérer des systèmes de coordonnées et d'exporter et d'importer des données en utilisant à la fois l'application mobile et le service cloud à l'adresse flow360.emlid.com.
3DroneMapping complète les essais PPK avec une erreur moyenne nulle sur tous les axes
Luke Wijnberg, 3DroneMapping
Pour résumer brièvement les résultats, la déviation maximale des points ne dépassait pas 0,09 m sur tous les axes. Il s'agit d'un résultat incroyable étant donné que la taille moyenne des pixels de l'imagerie obtenue était de 0,045 m. L'erreur moyenne dans tous les axes n'est que de quelques mm !
Tuffwing obtient une précision de 4 cm sans GCP avec Emlid Reach RTK
Brian Christal, Tuffwing
Tuffwing a récemment procédé à l'intégration du système RTK d'Emlid Reach pour permettre l'établissement de cartes de précision sans l'utilisation de GCP. Le système a été évalué en comparant un modèle géoréférencé direct avec un ensemble de GCP, utilisés uniquement à des fins de détection d'erreurs. Selon le rapport de qualité de Pix4D, l'erreur quadratique moyenne latérale obtenue n'est que de 4 cm.
Evеnt38 intègre Emlid Reach et commence à fournir une solution de cartographie PPK prête à l'emploi
Jeff Taylor, Event38
Dans cette étude de cas, nous avons produit une orthomosaïque dans le Drone Data Management System™ avec 2,45 cm de RMSE horizontale et 5,08 cm de RMSE verticale, par rapport à un GPS de qualité topographique au sol.
Mécanique
Électricité
Positionnement
Connectivité
Données
GNSS
Remplissez le formulaire de contact et nous vous répondrons dans un délai d'un jour ouvrable (9 h 00-18 h 00 CET).
Numérotation directe : +1 817 865 3334 (ex. 101)
Vous pouvez également nous envoyer un message :
.webp)
