
REACH M2
Posicionamiento con exactitud centimétrica
en RTK y PPK. Para cartografía precisa con UAV
con menos GCP.
Multibanda.
Línea base hasta 100 km en PPK.
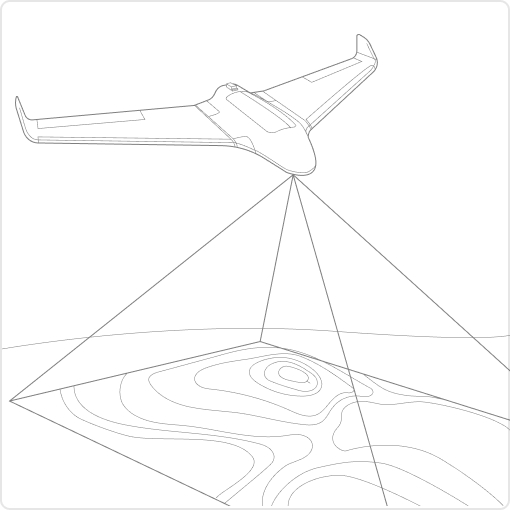
Normalmente, el piloto automático dispara la cámara y registra la coordenada que tiene en ese momento. Cuando el dron vuela a 20 m/s y el GPS funciona a 5 Hz, eso significa que el piloto automático solo tendrá lecturas de posición cada 4 m, lo cual no es adecuado para una georreferenciación precisa. Además, siempre hay cierto retraso entre el disparo y el momento real en que se toma la foto.
Reach resuelve el problema del posicionamiento conectándose directamente al puerto de la zapata de la cámara, que se sincroniza con el obturador. La hora y las coordenadas de cada foto se registran con una resolución inferior a un microsegundo. Este método permite utilizar los GCP solo para comprobar su exactitud.
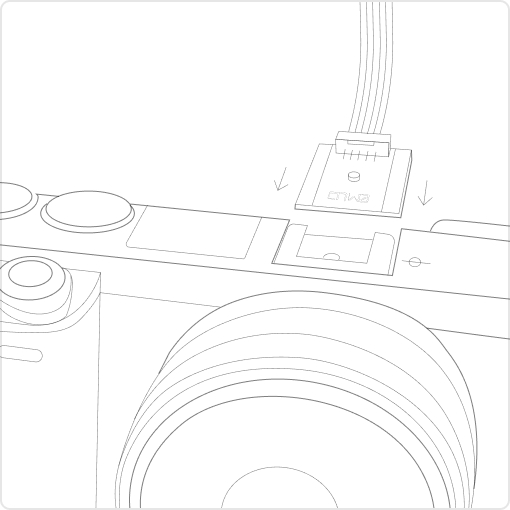
Cada vez que se hace una foto, la cámara produce un impulso en el conector de la zapata del flash que se sincroniza con la apertura del obturador.
Reach captura los impulsos de sincronización del flash con una resolución de submicrosegundos y los almacena en un registro RINEX de datos sin procesar en la memoria interna.
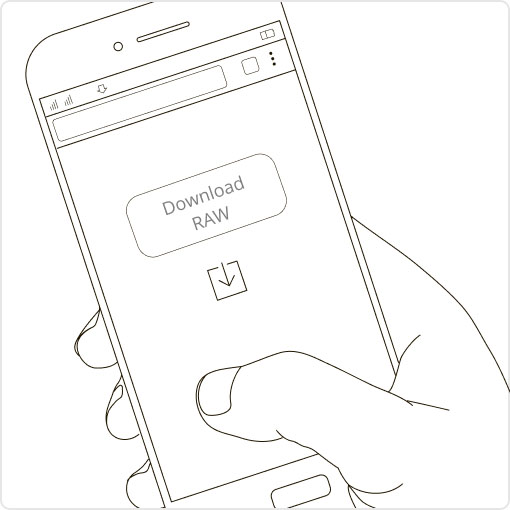
Tras el vuelo, obtén los registros RINEX de tu módulo aéreo Reach y de una estación base (Reach RS, CORS u otro receptor).
Procesa los archivos RINEX con el software gratuito RTKLIB. El archivo producido con coordenadas precisas de las fotos puede utilizarse para georreferenciación.

Para calcular coordenadas con precisión centimétrica en PPK y RTK, Reach necesita correcciones de una estación base. Puede ser otro receptor Reach o un servicio NTRIP. También es compatible con VRS.
Compatibilidad
Reach M2 funciona a la perfección con otros receptores Reach a través de cualquier enlace y son compatibles con cualquier otro receptor compatible con RTCM3 y NTRIP.

Emlid Flow es una aplicación móvil para iOS y Android. La aplicación gestiona todo el trabajo de campo , la configuración del receptor y la recopilación de datos. Todos los datos de la encuesta están sincronizados con el servicio basado en la nube Emlid Flow 360, que le permite acceder a sus proyectos desde el navegador y gestionar los datos de la encuesta.
Los registros se graban automáticamente en formato RINEX para su posterior procesamiento. Consulta una lista de los registros y descárgalos con la aplicación Emlid Flow.
Para PPK, puedes utilizar nuestro software gratuito Emlid Studio.
Emlid Flow muestra los niveles de satélite actuales y su ubicación en un mapa. Permite acceder fácilmente a información completa sobre el receptor: carga de la batería, tipo de conexión a Internet y estado de la solución del receptor.
Carga mapas topográficos, planos catastrales e imágenes aéreas de fuentes WMS y WMTS o trabaja con un mapa por satélite incorporado.
La aplicación Emlid Flow está sincronizada con el servicio Emlid Flow 360. Esto te permite crear y acceder a proyectos topográficos, gestionar sistemas de coordenadas y exportar e importar datos utilizando tanto la aplicación móvil como el servicio en la nube en flow360.emlid.com.
3DroneMapping completa los ensayos PPK con un error medio nulo en todos los ejes
Luke Wijnberg, 3DroneMapping
Como breve sinopsis de los resultados, la desviación máxima de los puntos no superó los 0,09 m en todos los ejes. Se trata de un resultado increíble si se tiene en cuenta que el tamaño medio de los píxeles de las imágenes resultantes era de 0,045 m. El error medio en todos los ejes es de unos pocos mm.
Tuffwing obtiene una precisión de 4 cm sin GCP con Emlid Reach RTK
Brian Christal, Tuffwing
Tuffwing ha realizado recientemente la integración de Emlid Reach RTK para poder realizar mapas de precisión sin utilizar GCP. El sistema se ha evaluado comparando un modelo georreferenciado directamente con un conjunto de puntos de referencia geográficos, utilizados únicamente con fines de detección de errores. Según el informe de calidad de Pix4D, el error RMS lateral alcanzado es de solo 4 cm.
Evеnt38 integra Emlid Reach y empieza a ofrecer una solución de cartografía PPK lista para usar
Jeff Taylor, Event38
En este estudio de caso, produjimos un ortomosaico en el Drone Data Management System™ con un RMSE horizontal de 2,45 cm y vertical de 5,08 cm, en comparación con un GPS de grado topográfico sobre el terreno.
Mecánica
Eléctrico
Posicionamiento
Conectividad
Datos
GNSS
Rellena el formulario de contacto y te responderemos en el plazo de un día laborable (9:00-18:00 CET).
Marcación directa: +1 817 865 3334 (ex. 101)
También puedes enviarnos un mensaje de texto aquí:
.webp)
