
REACH M2
Zentimetergenaue Positionierung
in RTK und PPK. Für präzise UAV-
Kartierung mit weniger GCPs.
Multiband.
Basislinie bis zu 100 km in PPK.
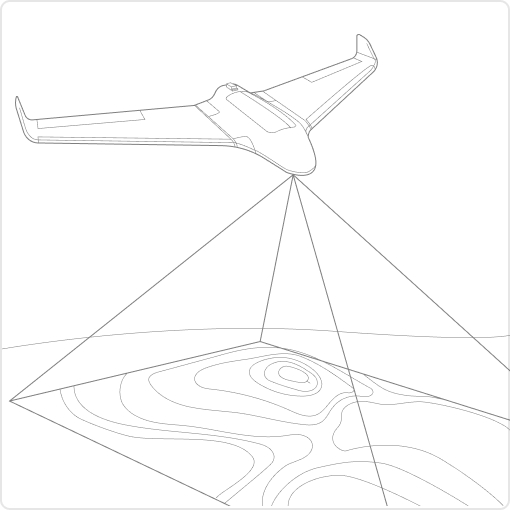
Normalerweise löst der Autopilot die Kamera aus und zeichnet die Koordinaten auf, die er in diesem Moment hat. Wenn die Drohne mit 20 m/s fliegt und das GPS mit 5 Hz arbeitet, bedeutet dies, dass der Autopilot nur alle 4 m eine Positionsmessung vornimmt, was für eine präzise Georeferenzierung nicht geeignet ist. Außerdem gibt es immer eine Verzögerung zwischen dem Auslöser und dem Moment, in dem das Foto tatsächlich aufgenommen wird.
Reach löst das Problem der Positionierung durch den direkten Anschluss an den Blitzschuh der Kamera, der mit dem Auslöser synchronisiert wird. Die Zeit und die Koordinaten jedes Fotos werden mit einer Auflösung von weniger als einer Mikrosekunde aufgezeichnet. Mit dieser Methode können Sie GCPs nur zur Überprüfung Ihrer Genauigkeit verwenden.
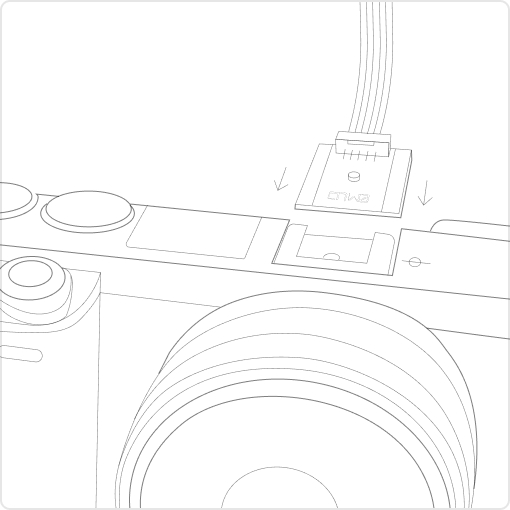
Jedes Mal, wenn ein Foto aufgenommen wird, erzeugt die Kamera einen Impuls an einem Blitzschuhanschluss, der mit der Öffnung des Verschlusses synchronisiert wird.
Reach erfasst Blitzsynchronisationsimpulse mit einer Auflösung im Submikrosekundenbereich und speichert sie in einem Rohdaten-RINEX-Protokoll im internen Speicher.
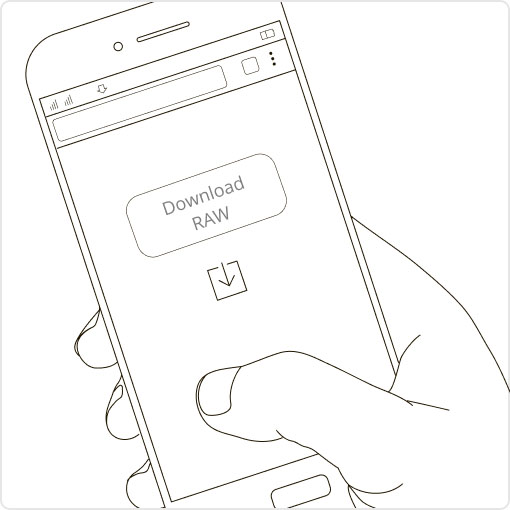
Holen Sie nach dem Flug die RINEX-Protokolle von Ihrem Reach-Modul in der Luft und einer Basisstation (Reach RS, CORS oder einem anderen Empfänger) ab.
Verarbeiten Sie RINEX-Dateien mit der kostenlosen Software RTKLIB. Die erzeugte Datei mit den genauen Koordinaten der Fotos kann für die Georeferenzierung verwendet werden.

Um zentimetergenaue Koordinaten in PPK und RTK zu berechnen, benötigt Reach Korrekturen von einer Basisstation. Dies kann entweder ein anderer Reach-Empfänger oder ein Ntrip-Dienst sein. VRS wird ebenfalls unterstützt.
Kompatibilität
Reach M2 arbeitet nahtlos mit anderen Reach-Empfängern über jede Verbindung zusammen und ist mit jedem anderen Empfänger kompatibel, der RTCM3 und Ntrip unterstützt.

Emlid Flow ist eine mobile App für iOS und Android. Die App verwaltet alle Feldarbeit-Empfänger-Einstellungen und Datenerfassung. Alle Vermessungsdaten werden mit dem cloudbasierten Dienst Emlid Flow 360 synchronisiert, mit dem Sie über den Browser auf Ihre Projekte zugreifen und Vermessungsdaten verwalten können.
Die Protokolle werden automatisch im RINEX-Format für die weitere Nachbearbeitung aufgezeichnet. Mit der App Emlid Flow können Sie eine Liste der Protokolle anzeigen und sie herunterladen.
Für PPK können Sie unsere kostenlose Software Emlid Studio verwenden.
Emlid Flow zeigt die aktuellen Satellitenpegel und Ihren Standort auf einer Karte an. Sie können ganz einfach auf alle Informationen über den Empfänger zugreifen: Akkuladung, Art der Internetverbindung und Status der Empfängerlösung.
Laden Sie topografische Karten, Katasterpläne und Luftbildaufnahmen aus WMS- und WMTS-Quellen hoch oder arbeiten Sie mit einer integrierten Satellitenkarte.
Die Emlid-Flow-App ist mit dem Dienst Emlid Flow 360 synchronisiert. So können Sie Vermessungsprojekte erstellen und darauf zugreifen, Koordinatensysteme verwalten und Daten sowohl über die mobile App als auch über den Cloud-Dienst unter flow360.emlid.com exportieren und importieren.
3DroneMapping schließt PPK-Versuche mit dem durchschnittlichen mittleren Fehler von Null in allen Achsen ab
Luke Wijnberg, 3DroneMapping
Eine kurze Zusammenfassung der Ergebnisse: Die maximale Abweichung der Punkte betrug in allen Achsen nicht mehr als 0,09 m. Dies ist ein unglaubliches Ergebnis, wenn man bedenkt, dass die durchschnittliche Pixelgröße des resultierenden Bildmaterials 0,045 m betrug. Der durchschnittliche mittlere Fehler in allen Achsen beträgt nur wenige mm!
Tuffwing erreicht mit Emlid Reach RTK eine Genauigkeit von 4 cm ohne GCPs
Brian Christal, Tuffwing
Tuffwing hat kürzlich die Integration von Emlid Reach RTK durchgeführt, um Präzisionskarten ohne die Verwendung von GCPs zu erstellen. Das System wurde durch den Vergleich eines direkt georeferenzierten Modells mit einem Satz von GCPs, die ausschließlich zur Fehlererkennung verwendet wurden, getestet. Der erzielte laterale RMS-Fehler beträgt laut Pix4D-Qualitätsbericht nur 4 cm.
Evеnt38 integriert Emlid Reach und bietet eine einsatzbereite PPK-Mapping-Lösung an
Jeff Taylor, Event38
In dieser Fallstudie haben wir mit dem Drone Data Management System™ ein Orthomosaik mit einem horizontalen RMSE von 2,45 cm und einem vertikalen RMSE von 5,08 cm erstellt, verglichen mit einem Vermessungs-GPS am Boden.
Mechanik
Elektrik
Positionierung
Konnektivität
Daten
GNSS
Füllen Sie das Kontaktformular aus und wir werden Ihnen innerhalb eines Werktages (9:00–18:00 Uhr MEZ) antworten.
Direktwahl: +1 817 865 3334 (exkl. 101)
Alternativ können Sie uns auch eine SMS schicken:
.webp)
